| Kevin Gallagher |
|
|
| Kevin Gallagher showing off his Fire Fighting Robot |
|
|
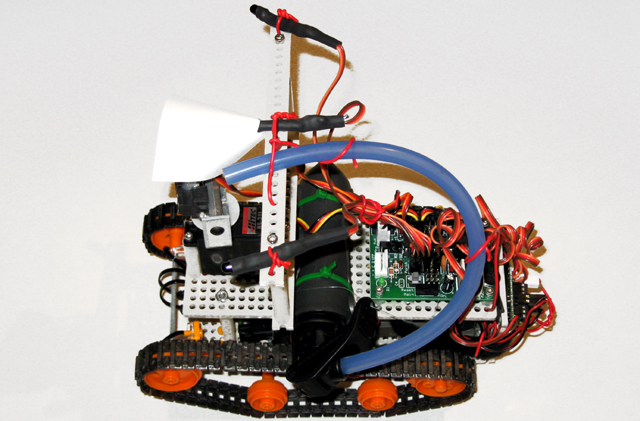
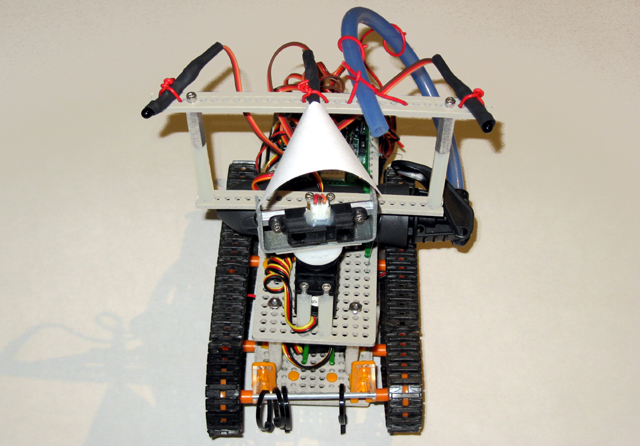
| Side view of Kevin's Fire Fighting Robot | Flames' death view of Kevin's Fire Fighting Robot. |
Mikroelectronica MikroC code
//////////////////////////////
/////Stuff/////////////////////
///////////////////////////////
int x;
char text[20];
unsigned int Left_IR;
unsigned int Right_IR;
unsigned int Centre_IR;
unsigned int sharps;
int twitch;
///////////////////////////////
/////Moving the Bot////////////
///////////////////////////////
/////Thataway//////////////////
void Forward()
{
PORTC = 0b11000011;
delay_ms(500);
PORTC = 0;
delay_ms(20);
}
/////---->/////////////////////
void Right()
{
PORTC = 0b11000101;
}
/////<----/////////////////////
void Left()
{
PORTC = 0b10100011;
}
/////Backwards/////////////////
void Back()
{
PORTC = 0b10100101;
}
/////Cease and Desist!/////////
void Stop ()
{
PORTC = 0;
delay_ms(1000);
}
///////////////////////////////
/////Turret Movement///////////
///////////////////////////////
/////Straight Ahead////////////
void Center()
{
x = 12;
while(x > 0)
{
PORTB.F5 = 1;
Delay_us(1450);
PORTB.F5 = 0;
PORTC = 0b11000011;
delay_ms(19);
x = x - 1;
}
//Centre_IR = Adc_Read(0);
sharps = Adc_read(0);
if (sharps > 200)
{
PORTC = 0b11000101;
delay_ms(500);
sharps = 100;
}
}
/////Turret ---->//////////////
void FarRight()
{
x = 12;
while(x > 0)
{
PORTB.F5 = 1;
Delay_us(850);
PORTB.F5 = 0;
PORTC = 0b11000011;
delay_ms(19);
x = x - 1;
}
//Right_IR = Adc_Read(0);
sharps = Adc_read(0);
if (sharps > 350)
{
PORTC = 0b10100011;
delay_ms(250);
sharps = 100;
}
}
/////Turret <----//////////////
void FarLeft()
{
x = 16;
while(x > 0)
{
PORTB.F5 = 1;
Delay_us(2050);
PORTB.F5 = 0;
PORTC = 0b11000011;
delay_ms(19);
x = x - 1;
}
//Left_IR = Adc_Read(0);
sharps = Adc_read(0);
sharps = Adc_read(0);
sharps = Adc_read(0);
if (sharps > 350)
{
PORTC = 0b11000101;
delay_ms(50);
sharps = 100;
}
}
///////////////////////////////
/////LCD Display///////////////
///////////////////////////////
void LCD()
{
// text = "Mr Cool ";
Lcd_Init(&PORTB); // Initialize LCD connected to PORTB
Lcd_Cmd(Lcd_CLEAR); // Clear display
Lcd_Cmd(Lcd_CURSOR_OFF); // Turn cursor off
Lcd_Out(1, 1, text); // Print text to LCD, 2nd row, 1st column
// text = "is cool!";
Lcd_Out(2, 1, text);
}
///////////////////////////////
/////Sensor Stuff//////////////
///////////////////////////////
/////Left Sensor///////////////
void SensorDisplayL()
{
Left_IR = Adc_Read(2);
}
/////Right Sensor//////////////
void SensorDisplayR()
{
Right_IR = Adc_Read(1);
}
/////Centre Sensor/////////////
void SensorDisplayC()
{
Centre_IR = Adc_Read(3);
}
/////Comparison////////////////
void SensorCompare()
{
//Lcd_Cmd(Lcd_CLEAR);
Left_IR = Adc_Read(2);
Right_IR = Adc_Read(1);
Centre_IR = Adc_Read(3);
//SensorDisplayL(); //Leftie
//SensorDisplayR(); //Rightie
// SensorDisplayC(); //Centre
if(Right_IR > Centre_IR) //Centre has less than right
{
if(Left_IR > Centre_IR) //Centre has less than left
{
Forward();
delay_ms(500);
}
if(Left_IR < Centre_IR) //Centre has more than left
{
Left();
delay_ms(500);
}
}
if(Left_IR > Centre_IR) //Centre has less than left
{
if(Right_IR > Centre_IR) //Centre has less than right
{
Forward();
delay_ms(500);
}
if(Right_IR < Centre_IR) //Centre has more than right
{
Right();
delay_ms(500);
//Forward();
}
}
}
/////Comparison////////////////
void Sensorscan()
{
//Lcd_Cmd(Lcd_CLEAR);
Left_IR = Adc_Read(2);
Right_IR = Adc_Read(1);
Centre_IR = Adc_Read(3);
if(Right_IR < 600) //Centre has less than right
{
PORTC = 0b11000101;
delay_ms(500);
}
if(Left_IR < 600) //Centre has less than left
{
PORTC = 0b10100011;
delay_ms(500);
}
}
/////Servo 2///////////////////
void Pull()
{
x = 60;
while(x > 0)
{
PORTB.F4 = 1;
Delay_us(250);
PORTB.F4 = 0;
delay_ms(20);
x = x - 1;
}
PORTC = 0b10100011;
delay_ms(20);
PORTC = 0b11000101;
delay_ms(20);
x = 40;
while(x > 0)
{
PORTB.F4 = 1;
Delay_us(2000);
PORTB.F4 = 0;
delay_ms(20);
x = x - 1;
}
}
///////////////////////////////
/////Main Portion//////////////
///////////////////////////////
void Main ()
{
TRISA = 0b00011111;
TRISB = 0;
TRISC = 0;
PORTC = 0;
ADCON1 = 10000000;
//Centre_IR = 401; // |\
SensorDisplayC(); // | |
while(1) // | |> ___
{ // | | _|___|_
//SensorCompare(); // |/| (o_o)
if(Centre_IR > 600) // | _|_
{ // | | |
Center(); // o----| ||
FarLeft(); // | | ||
Center(); // | | ||
FarRight(); // | | ||
Sensorscan(); // | | ||
} // | | |o
if(Centre_IR < 599) // | |___|
{ // | | |
// | | |
SensorCompare(); // | _| |_
if(Centre_IR < 300)
{
Stop();
Pull();
Sensorscan();
}
// Center();
}
}
}
|
Material List
|