

|
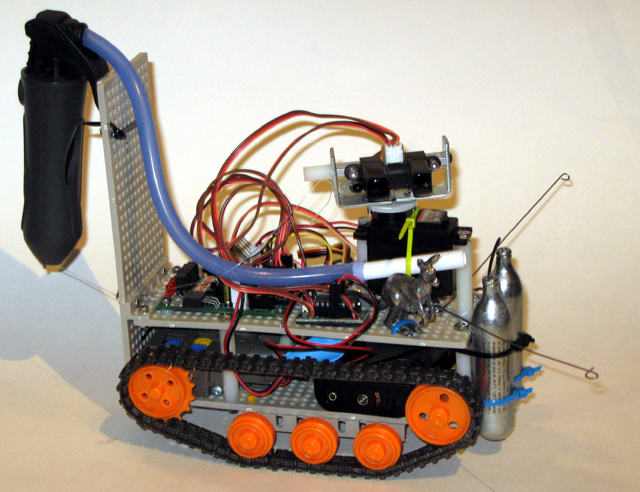
I am A-dawg Welcome one and all!! NOW BOW! This is my robot's site |
|
|
|||
|
|
|||
|
|
|||
|
|
program nobump
Dim x as byte
Dim Flame_Pos_Center as word
Dim Flame_Pos_Right as word
Dim Flame_Pos_Left as word
dim Front_Edge as word
dim Left_Edge as word
dim Right_Edge as word
dim flame as integer
'*************************
Sub Procedure Forward
'PortC = %10100101 'Bits 2 and 5 are Enable
SetBit(PortC,0) '0
ClearBit(PortC,1) '1
SetBit(PortC,2) '2
SetBit(PortC,5) '5
ClearBit(PortC,6) '6
SetBit(PortC,7) '7
End Sub
'*************************
Sub Procedure Reverse
PortC = %01100110
End Sub
'*************************
Sub Procedure T_Right
PortC = %10100110
End Sub
'*************************
Sub Procedure T_Left
PortC = %01100101
End Sub
'*************************
Sub Procedure Halt
PortC = %00000000
End Sub
'*************************
Sub Procedure Sort_Flame
If Flame_Pos_Right < Flame_Pos_Center then
T_Right
Delay_ms(200)
End If
If Flame_Pos_Left < Flame_Pos_Center then
T_Left
Delay_ms(200)
End If
If Flame_Pos_Center < 120 then
halt
x = 50
Do
SetBit(PortB,0)
Delay_us(600)
ClearBit(PortB,0)
Delay_ms(20)
x = x - 1
Loop Until x = 0
x = 15
Do
SetBit(PortB,0)
Delay_us(1000)
ClearBit(PortB,0)
Delay_ms(20)
x = x - 1
Loop Until x = 0
Flame_Pos_Center = 300
Flame_Pos_Right = 300
Flame_Pos_Left = 300
End If
End Sub
'********************
Sub Procedure Sort_Edge
If left_edge < 100 then
T_Right
Delay_ms(200)
End If
If Left_edge < front_edge then
T_Left
Delay_ms(200)
End If
if front_edge < 100 then forward
end if
End Sub
'********************
Sub Procedure Center
x = 15
Do
SetBit(PortB,0)
Delay_us(1500)
ClearBit(PortB,0)
Delay_ms(20)
x = x - 1
Loop Until x = 0
Flame_Pos_Center = Adc_Read(0)
Front_Edge = adc_read(1)
End Sub
'********************
Sub Procedure FarRight
x = 25
Do
SetBit(PortB,0)
Delay_us(2000)
ClearBit(PortB,0)
Delay_ms(20)
x = x - 1
Loop Until x = 0
Flame_Pos_Right = Adc_Read(0)
Right_Edge = adc_read(1)
End Sub
'********************
Sub Procedure FarLeft
x = 15
Do
SetBit(PortB,0)
Delay_us(1000)
ClearBit(PortB,0)
Delay_ms(20)
x = x - 1
Loop Until x = 0
Flame_Pos_Left = Adc_Read(0)
Left_Edge = adc_read(1)
End Sub
'********************
main:
trisb = %00000000
trisa = %00011111
trisc = %00000000
ADCON1 = %10000000
'sound_init(PortC,3)
PortB = 0
While True
'*********
FarRight
Center
FarLeft
Forward
If Flame_Pos_Center < 250 Then
flame = 201
Sort_Flame
else
flame = 199
End if
If Flame_Pos_Right < 250 Then
flame = 201
Sort_Flame
else
flame = 199
End if
If Flame_Pos_Left < 250 Then
flame = 201
Sort_Flame
else
flame = 199
End if
If flame < 200 Then
If Left_Edge > 450 Then
t_right
delay_ms(100)
End if
If Right_Edge > 450 Then
t_left
delay_ms(100)
End if
If Front_Edge > 450 Then
t_right
delay_ms(500)
end if
end if
wend
'*******
'If Front_Edge < 200 Then
'Forward
'End if
End.